Computer Vision
My notes for CS4243
L7,L8,L9 Keypoints notes
Combining 2 images
Find keypoints / interest points / corners / Harris Corners
- Preferably Invariant to transformations (if it is affected = equivariant)
- Geometric (warping img transformation):
- Translation & Rotation: KP Location not invariant, Harris Corner resp. invariant
- Scale: Corner response not invariant
- To counter: slowly scale image from small to big and find scale for which response R is the largest
- Instead of continuous scales, we can use the gaussian pyramid method
- Instead of using Harris Corner response (expensive to run on all pixels), we can use LoG as a response on the image to find the scale (note: only to find the scale, LoG looks for edges not corners specifically)
- https://automaticaddison.com/how-the-laplacian-of-gaussian-filter-works/
- Find 1st derivative of image to find gradients
- Sensitive to noise, so instead use 2nd derivative of image (edge at 0)
- Both sensitive to noise, so apply gaussian filter first, then Laplacian (thus LoG)
- Extra: Found in W4 L4 gradients.pdf
- Approximate LoG using Difference of Gaussian (using Gaussian pyramid)
- Photometric (filtering img transformation):
- Intensity changes:
- Difference is the same: response invariant
- Otherwise response not invariant (is heavily dependent on gradient intensity due to thresholding, L7S38)
- Distinct from other descriptors (Harris Corners)
- Look for corners (significant gradient in all directions)
- Find pixel I(x,y) with highest intensity difference w.r.t. all surrounding pixels I(x+u,y+v) based on window [Slide 15]
- In practice, weighted by distance from center pixel (L7S31)
- Approximate I(x+u,y+v) from I(x,y) using Taylor Series expansion up to 1st order approximation (L7S16)
- Thus obtaining the 2nd moment matrix H at S17 and S18
- Then, diagonalize the matrix and get its eigenvalues. These eigenvalues represent the horizontal and vertical gradient. We want both to be strong (thus response R = min(lambda1, lambda2))
- Harris Operator: Since det(H) = lambda1 lambda2 and trace(H) = lambda1 + lambda2, R is approximated by det(H) - ktrace^2(H), if > 0 we call it a corner
- Non-maximum suppression Get local maximum (maybe by window S28), then pick the maxima of the local maxima within a radius (S30)
- Efficient (Don't want too many)
- Small (robust to clutter and occlusion)
Compute feature descriptors (vectors) to mathematically represent these keypoints and their surrounding region
- Vector of pixel intensities: sensitive to any change
- Vector of gradients: sensitive to deformations
- Color histogram: invariant to scale & rotation, but more false matches
- Spatial histograms: compute different histograms on patch split into grid: some invariance to deformations
- To make sure rotation invariant, normalize orientation by finding dominant orientation (overall gradient), then rotate patch to that direction
- Multi-Scale Oriented Patches (MOPS): To reduce effect of deformations, subsample parts of the patch, normalize then wavelet transform.
- GIST: Compute Gabor filter bank histogram from each square in patch split into a grid
- SIFT: 4 Steps
- Benefits
- Invariant to scale and rotation
- Find best scale for keypoints: Multi-Scale Extrema (Blob) Detection
- Gaussian Pyramid (each level is an "octave" with scale decreasing by 1/2 per level)
- At each level, discretely vary the sigma to calculate the difference of gaussian (to approx. LoG) and find local maxima
- Refine keypoint location to sub-pixel accuracy
- Compute Harris Corner response (Hessian) of DoG image and keep maxima if HC response above threshold
- Rotate keypoints based on their dominant orientation
- Create descriptor
- Re-weight gradient magnitudes for each pixel based on gaussian centered on keypoint, discard pixels with low magnitude
- Split patch into grid, then create gradient orientation histogram (8 bins, 45deg per bin) for each square
- Make sure descriptors aligned to dominant orientation, then normalize vector, clamp values, etc
- Benefits
- To make sure rotation invariant, normalize orientation by finding dominant orientation (overall gradient), then rotate patch to that direction
- Spatial histograms: compute different histograms on patch split into grid: some invariance to deformations
Perform keypoint / feature matching
- Simple: Minimum SSD between the feature vectors
- Better: ratio distance 1stDiff:2ndDiff (smaller the better)
- dist(kp_in_imgA - bestKp_in_imgB) / dist(kp_in_imgA - 2ndBestKp_in_imgB)
- Test this feature in img_A with all other features in img_B using indexing structure
- Set a threshold, which affects
- Precision: % of matches being true matches [TP / (TP + FP)]
- Higher threshold = more lax = lower precision
- Recall: % of all true matches found [TP / (TP + FN)]
- Higher threshold = more lax = higher recall
- Specificity: % of all false matches discarded [TN / (TN + FP)]
- Higher threshold = more lax = lower specificity
- Precision: % of matches being true matches [TP / (TP + FP)]
Perform a transformation on img_B to merge it with img_A using the keypoint matches {p,p'}
- If {p,p'} is a correct match, then p = a H p'
- p = [x, y, z]^T where z=1, .: [x, y, z]^T
- a is an unknown scale factor
- H is a 3x3 homography matrix (See L9 S10)
- See what is a homography
- Isometric transformations (just skip through)
- How it is related to the matrix
- Last row (0,0,1) to preserve z = 1
- Similarity: same as isometric but with scale
- Affine: skew
- Projective / homography:
- Perspective transformation: 1 level above
- Isometric transformations (just skip through)
- See what is a homography
- 4 pairs needed to calculate a concrete H matrix as it has 8 degrees of freedom
- Solve using normalized DLT
- Outliers (bad matches) will significantly affect the DLT, so do Random Sampling Consensus (RANSAC)
- RANSAC: General algorithm to estimate best parameters to fit model to inliners (S20)
- Randomly sample minimum points required to fit model
- Solve for model parameters using samples
- Count number of points (inliers) that are covered by the model (using a threshold) using the params found
- Choose the params that cover the most points after iterating N times
- Formula for N based on % of inliers and confidence % of iteration without outliers on S24
- RANSAC: General algorithm to estimate best parameters to fit model to inliners (S20)
Refresher on Gaussian, Laplacian of Gaussian & Difference of Gaussian
- Gaussian: Standard distribution but on 3D space (imagine x-axis now on x and y axis)
- Laplacian of Gaussian = 2nd derivative of gaussian
- Difference of Gaussian: Difference of image blurred with gaussians of different sigma
- Approximation for the LoG
- See https://en.wikipedia.org/wiki/Difference_of_Gaussians
L10, L11, 12
Tracking
- Estimate 2D / 3D position of object in a video (vid1)
- 2D / 3D position: "parameters"
- object: "system" consisting of feature points
Possible Methods:
- Optical flow (translation transformation only)
- Template matching
- Find a target image in the image
- Using normalized cross-correlation
- Using LK Alignment (Optical flow w/ Affine transformations)
- Or using Mean-shift tracking
- Find a target image in the image
Basic Optical flow
- Follow pixel based on its translation movement
- Only reliable for small movements
- Easily messed up with occlusions or textureless regions
Normalized X-correlation
- Method 1: Normalized Cross-Correlation
- Cross-correlating an image with a template of the image you want to find
- Not normalized: Response is affected by base intensity of the image
- Normalized: Local max of response is most likely location
- Slow, combinatory, global (cross-correlate entire image)
- Cross-correlating an image with a template of the image you want to find
- Method 2: Multi-scale template matching
- Perform template matching on pyramid from small to large scale (scale for both img and template)
- Do local search on areas of higher response
- Faster, combinatory, locally optimal
Local Refinement
- Method 3: Local refinement based on initial guess
- Fastest, Locally optimal
- Definitions:
- 2D image transformation:
- x = position ()
- p = transformation parameters =
- N is dependent on type of transformation (See below for transform x coordinate matrix)
- Translation: W(x;p) = = =
- Affine: W(x;p) = =
- Template Image , x is a pixel coordinate in frame T
- Input Image , x is a pixel coordinate in frame I
- Warp function W(x;p): Takes pixel x in coordinate frame of T and maps it to sub-pixel location W(x;p) in coordinate frame of I
- i.e. Let's say you have a coordinate x w.r.t. coordinate frame T
- T(x) gives you the pixel values (intensity) of its original position in the template
- I(x) gives you the pixel values (intensity) of some position in the image that is unrelated to its real position in the template
- I(W(x;p)) gives you the pixel values (intensity) of some position in the image that is most likely where:
- If you were to map the template onto the image, that's where it would be if the template was mapped on the image
- The warped coordinates is also referred to as
- https://www.ri.cmu.edu/pub_files/pub3/baker_simon_2004_1/baker_simon_2004_1.pdf
- 2D image transformation:
- Then we can represent:
- Warped Image:
- Template Image:
- Then assume lowest difference between the two and sum over all the results
- We want to solve for p to find where the template will map to
- Find warp parameters p s.t. SSD is minimized over all pixels in the template img
- This is hard to optimize because I(W(x;p)) is not linear
LK Alignment
Lucss-Kanade (Additive) Alignment, which builds on the idea of local refinement; basically Optical Flow but using affine transformations instead of translation
- Theory
- Methodology
- Assuming we had a good initial guess on the params p
- We can separate initial guess p and and minimize
- Since is small we can use Taylor Series approximation to linearise I(...)
- Refresher: Multivariable Taylor Series Expansion (1st order approx)
- Apply chain rule we get:
- Now recall that , hence = gradient of I (i.e. )
- = Jacobian Matrix (Matrix of Partial Derivatives)
- Refresher
- Example: Affine: W(x;p) (See main formula above)
- Example: Affine: W(x;p) (See main formula above)
- Rate of change of the warp w.r.t. each warp param
- Refresher
- = Jacobian Matrix (Matrix of Partial Derivatives)
- Refresher: Multivariable Taylor Series Expansion (1st order approx)
- And then we step out and get this:
- : Image gradient (1x2 vector); rate of change of pixel intensity at the warped coordinates w.r.t the warp
- This is parallelizable (each coord. is independent)
- Reshuffle to group the constants:
- A is a constant vector ()
- x is a vector of variables ()
- b is a constant scalar ()
- Which we can use Least Square approximation to solve
- Refresher: is solved by:
- Using the simplified terms we introduced (A,x,b)
- H is the Hessian Matrix (matrix of 2nd order derivative)
- Approximated using Gauss-Newton
- H is the Hessian Matrix (matrix of 2nd order derivative)
| Task | Eqn |
|---|---|
| Warp Image | |
| Compute Error Image (b) | |
| Compute Gradient | (diff in intensity) |
| Evaluate Jacobian | |
| Get vector "A" | |
| Approximate Hessian | , x: pixel coord |
| Compute | |
| Update params p |
This is the same as the Lucas-Kanade optical flow.
Using LK Alignment
- Choose good features for tracking (corners) using harris corners
- Loop over corners
- Compute displacement to next frame using LK alignment
- Store displacement of each corner, update corner position
- (optional) Add more corners every M frames
- Return long trajectories for each corner
Challenges for feature-based tracking
- Efficiency
- Accuracy
- Changing appearances / disappearances
Feature Tracking & Optical Flow
- Optical Flow
- Assuming brightness constancy, Calculate pixel movement
- Feature Tracking
- Follows specific pixels as they move across multiple frames
- Once we have features to track, we can use optical flow to track them
Mean-shift Tracking
- Theory
- Methodology
- Given a target (template) and an image (filled with candidate pixels), find most likely position
- Initial tracking often done manually
- Assume that the matching box stays the same (scale) for this simplified version
- Errors:
- Catastrophic:
- Occlusion
- Exit frame
- Multiple objects
- Gradual:
- Drifting
- Catastrophic:
- Use Mean-shift clustering for tracking
- Mean-shift clustering
- (find mode / local density maxima in feature space)
- For each datapoint
- Define a window around it, compute centroid
- Shift center of window to centroid
- Repeat until centroid stops moving convergence
- For each datapoint
- Applying this to tracking:
- Given a set of points and a kernel
- We want to slowly shift to be the mode
- Init x
- While v(x) >
- Compute the mean-shift (mean = m(x), shift = v(x))
- All pixels are equally spread out (the distance between every pixel are the same), so to use mean-shift on them we have to apply a weight to each of the pixels when calculating the sample mean
- Update
- Defining the Target as a feature:
- Represented by a M-dimensional descriptor
- (computed from patch centered at target)
- There are many ways, but one way is to take a histogram of the difference in colour (of region to center pixel)
- As a math eqn:
- C: normalization factor (w.r.t. size of target)
- sum: Apply this to all pixels in the patch
- Kernel inversely weighting the pixel's contribution in the histogram based on its distance from the center pixel
- : If not 0, then it would evaluate to 0; pick out the m-th bin
- : quantization function
- : bin id
- Hence contribution only made if it quantizes to the bin
- As a math eqn:
- There are many ways, but one way is to take a histogram of the difference in colour (of region to center pixel)
- (computed from patch centered at target)
- Represented by a M-dimensional descriptor
- Defining the Candidate (any pixel in the searched image) as a feature:
- Also as a M-dimensional descriptor but now as (centered at location )
- The way of calculating it is exactly the same; the only difference is that we include the bandwidth variable
- So the goal is to maximize the similarity between p(y) and q
- I'm not even going to bother putting the equation here because it's ridiculously large
- i.e. maximize the Bhattacharyya coefficient
- Linearize around the initial guess like we did with the LK Tracking
- Approximate the derivation with Taylor series expansion
- Shift the terms around
- You'll get this monster, which is the weighted kernel density estimate of the similarity (to the target) over the image:
- Notice that the left half is pretty much a constant and we only need to maximize the part involving the weights, so we can use the mean-shift algorithm on that to get the sample of mean of this Kernel Density Estimate (KDE)
- Assign the most similar candidate as our new target
- Repeat procedure for our next frame.
- Frame to frame: may drift
![]()
Evaluating Trackers
- Accuracy
- How well the tracker bounding box overlap with ground truth bounding box
- Robustness
- # of times failed (lost target) and had to reset to resume
- Average over multiple times on a sequence
Deep learning in Computer Vision
Data Driven Image Classification
- All the info is in the data
- All questions have already been answered many times, in many ways
- The real intelligence is contained in the data
- Maybe we don't really need strong computer vision systems, why not we have a lot of data and just brute-force high level reasoning?
- The unreasonable effectiveness of data (Alon Halevy et al) for NLB
- Collect a huge dataset of images with associated info
- Input image + dataset
- Info from most similar images would map to input image
- ImageNet
- Input image + dataset
- Usage of Narrow AI
- AI targetted at specific tasks
- Deep learning = big data + known algorithms + computing power (GPU)
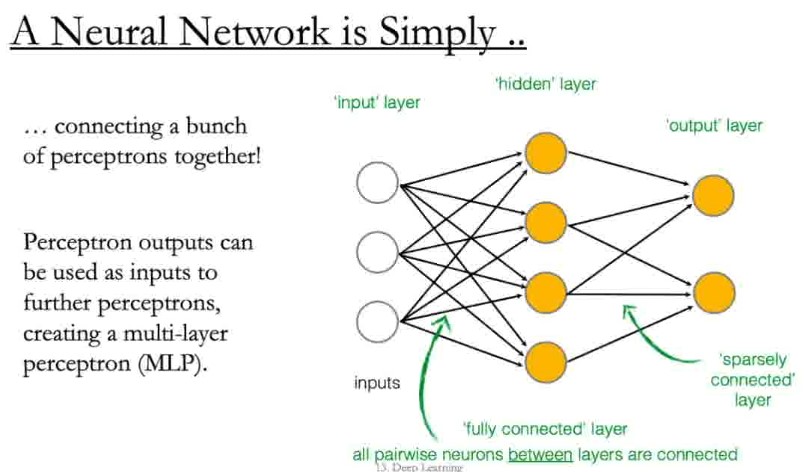
Basic structure of a neural network
- Original design of the perceptron

- Each input is multiplied by a weight & summed together
- The perception is the:
- Sum (& weights)
- # of Edges
- Each layer is fully connected to each other (except for the last layer), so edges between each layer is layer1_size x layer2_size
- # of Edges
- Activation function (& bias)
- # of Perceptrons
- Sum (& weights)
- This sum is shifted by a bias
- Idea 1: pass each pixel of the image as an input
- Crazy, too many weights
- Idea 2: Take the idea that pixels closer to each other are more correlated to each other
- Thus, pass the pixels in terms of their local neighborhood
- Multiple neural networks, each dealing with their local neighborhood
- But hold up a minute
- Stationarity: Statistics are similar at different locations
- e.g. for Harris Corners, the definition of what a corner didn't change by its location
- Idea 3: Use the same neural network for each local neighborhood
- This is exactly like the convolution operation (except the bias)
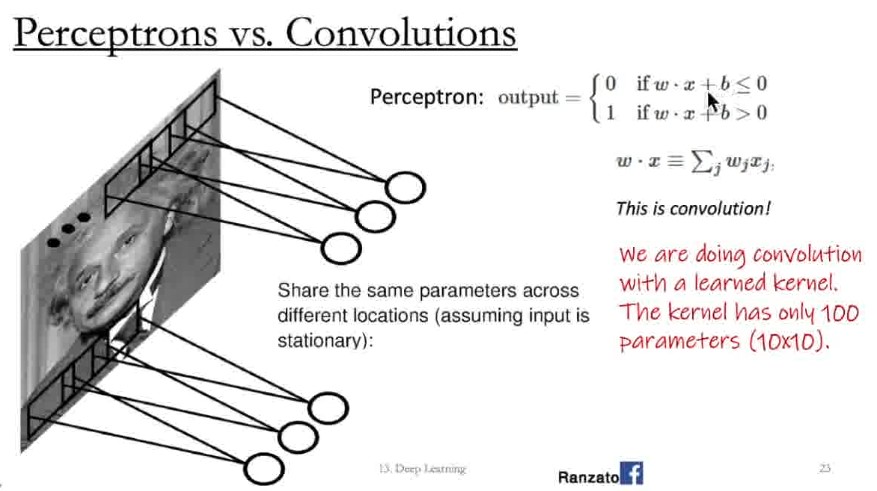
- Basically you're doing convolution but this time with dynamically learnt weights of the kernels / filters s.t. they are effective for the task
- We can even take multiple NNs, each to learn 1 kernel / filter.
- Since it samples by neighborhood, the input and output remain as 2D (rather than reshaped to 1D vector)
- Output is called feature map
- If there are multiple filters, we get multiple feature maps;
- Each map is thus a channel of the output
Pooling
- Pooling: CNNs also aggregate response of a neighborhood (e.g. 2x2 patches)
- Kind of like "downsampling"
- But instead we do like max pooling
- i.e. take a maximum within a neighborhood
Rectified Linear Unit
- In CNN the activation function, ReLU for short, is as follows:
- f(x) = max(0, x)
- this is a non-linear function
- Thus it's called "non-linearity"
Convolutional Neural Network
Each system: Input -> Convolution -> ReLU -> max pooling -> output
Can be a bit flexible e.g. conv -> relu -> conv
- You see some visualization on CS 231n
- LeNet
These systems are "Stacked" so the input goes through system after system
Neural network is really just putting these things in a cascade
Interleaving convolutions and pooling cause later convolutions to capture a larger fraction of the resultant image with the same kernel size
Set of image pixels that an intermediate output pixel depends on = receptive field
Local interactions - receptive fields
- Assume that in an image, we care about "local neighborhoods" only for a particular neural network layer
- Composition of layers will expand local to global
Param sharing (which is already being done)
- Since same weights applied to each neighborhood; equivariant representation regardless of location
Applications
- Image Classification
- Object Detection
- Classifying objects and localizing them with a bounding box
- Semantic Segmentation
- Associating each pixel in the image with a class label
- Instance segmentation
- Associating each pixel in the image with the object to which it belongs